When we think about robotic manipulation, the default is usually to think about grippers—about robots using manipulators (like fingers or other end effectors) to interact with objects. For most humans, though, interacting with objects can be a lot more complicated, and we use whatever body parts are convenient to help us deal with objects that are large or heavy or awkward.
This somewhat constrained definition of robotic manipulation isn’t robotics’ fault, really. The word manipulation itself comes from the Latin for getting handsy with stuff, so there’s a millennium or two’s-worth of hand-related inertia behind the term. The Los Altos, Calif.–based Toyota Research Institute (TRI) is taking a more expansive view with their new humanoid, Punyo, which uses its soft body to help it manipulate objects that would otherwise be pretty much impossible to manage with grippers alone.
“An anthropomorphic embodiment allows us to explore the complexities of social interactions like physical assistance, nonverbal communication, intent, predictability, and trust, to name just a few.” —Alex Alspach, Toyota Research Institute (TRI)
Punyo started off as just a squishy gripper at TRI, but the idea was always to scale up to a big squishy humanoid, hence this concept art of a squishified T-HR3:
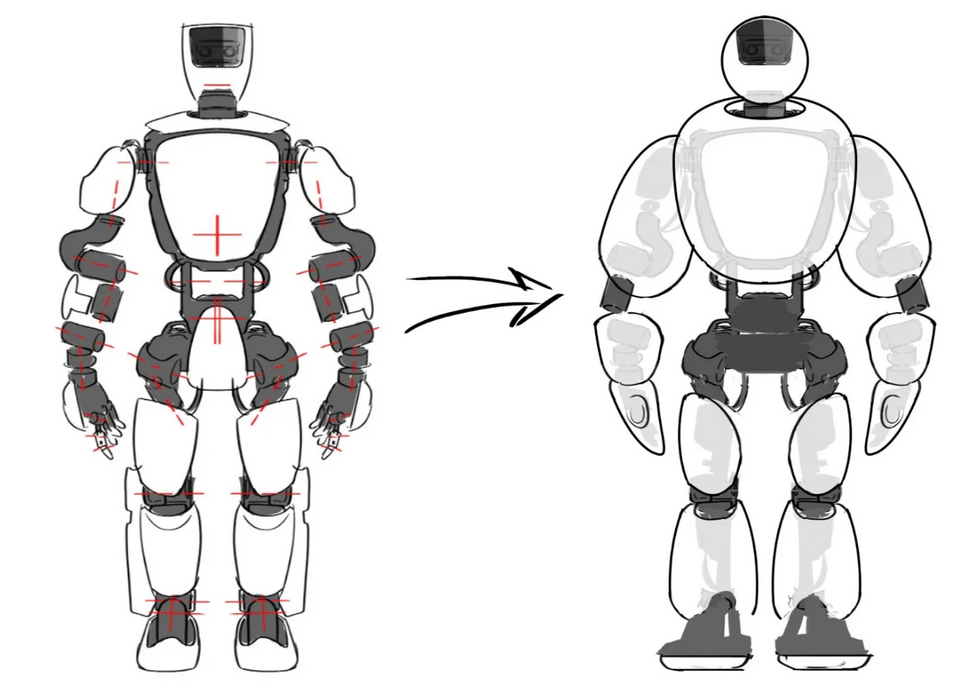 This concept image shows what Toyota’s T-HR3 humanoid might look like when “bubble-ized.”TRI
This concept image shows what Toyota’s T-HR3 humanoid might look like when “bubble-ized.”TRI
“We use the term ‘bubble-ized,’ says Alex Alspach, tech lead for Punyo at TRI. Alspach tells us that the concept art above doesn’t necessarily reflect what the Punyo humanoid will eventually look like, but “it gave us some physical constraints and a design language. It also reinforced the idea that we are after general hardware and software solutions that can augment and enable both future and existing robots to take full advantage of their whole bodies for manipulation.”
This version of Punyo isn’t quite at “whole” body manipulation, but it can get a lot done using its arms and chest, which are covered with air bladders that provide both sensing and compliance:
Many of those motions look very humanlike, because this is how humans manipulate things. Not to throw too much shade at all those humanoid warehouse robots, but as is pointed out in the video above, using just our hands outstretched in front of us to lift things is not how humans do it, because using other parts of our bodies to provide extra support makes lifting easier. This is not a trivial problem for robots, though, because interactions between point contacts that are rigid (like how most robotics manipulators handle the world) are fairly well understood. Once you throw big squishy surfaces into the mix, along with big squishy objects, it’s just not something that most robots are ready for.
“A soft robot does not interact with the world at a single point.” —Russ Tedrake, TRI
“Current robot manipulation evolved from big, strong industrial robots moving car parts and big tools with their end effectors,” Alspach says. “I think it’s wise to take inspiration from the human form—we are strong enough to perform most everyday tasks with our hands, but when a big, heavy object comes around, we need to get creative with how we wrap our arms around it and position our body to lift it.”
Robots are notorious for lifting big and heavy objects, primarily by manipulating them with robot-y form factors in robot-y ways. So what’s so great about the human form factor, anyway? This question goes way beyond Punyo, of course, but we wanted to get the Punyo team’s take on humanoids, and we tossed a couple more questions at them just for fun.
IEEE Spectrum: So why humanoids?
Alspach: The humanoid robot checks a few important boxes. First of all, the environments we intend to work in were built for humans, so the humanoid form helps a robot make use of the spaces and tools around it. Independently, multiple teams at TRI have converged on bimanual systems for tasks like grocery shopping and food preparation. A chest between these arms is a simple addition that gives us useful contact surfaces for manipulating big objects, too. Furthermore, our human-robot interaction (HRI) team has done, and continues to do, extensive research with older adults, the people we look forward to helping the most. An anthropomorphic embodiment allows us to explore the complexities of social interactions like physical assistance, nonverbal communication, intent, predictability, and trust, to name just a few.
“We focus not on highly precise tasks but on gross, whole-body manipulation, where robust strategies help stabilize and control objects, and a bit of sloppiness can be an asset.” —Alex Alspach, TRI
Does having a bubble-ized robot make anything more difficult for you?
Russ Tedrake, VP of robotics research: If you think of your robot as interacting with the world at a point—the standard view from, for example, impedance control—then putting a soft, passive spring in series between your robot and the world does limit performance. It reduces your control bandwidth. But that view misses the more important point. A soft robot does not interact with the world at a single point. Soft materials fundamentally change the dynamics of contact by deforming around the material—generating patch contacts that allow contact forces and moments not achievable by a rigid interaction.
Alspach: Punyo’s softness is extreme compared to other manipulation platforms that may, say, just have rubber pads on their arms or fingers. This compliance means that when we grab an object, it may not settle exactly where we planned for it to, or, for example, if we bump that object up against the edge of a table, it may move within our grasp. For these reasons, tactile sensing is an important part of our solution as we dig into how to measure and control the state of the objects we manipulate. We focus not on highly precise tasks but on gross, whole-body manipulation, where robust strategies help stabilize and control objects, and a bit of sloppiness can be an asset.
Compliance can be accomplished in different ways, including just in software. What’s the importance of having a robot that’s physically squishy rather than just one that acts squishily?
Andrew Beaulieu, Punyo tech lead: We do not believe that passive and active compliance should be considered mutually exclusive, and there are several advantages to having a physically squishy robot, especially when we consider having a robot operate near people and in their spaces. Having a robot that can safely make contact with the world opens up avenues of interaction and exploration. Using compliant materials on the robot also allows it to conform to complicated shapes passively in a way that would otherwise involve more complicated articulated or actuated mechanisms. Conforming to the objects allows us to increase the contact patch with the object and distribute the forces, usually creating a more robust grasp. These compliant surfaces allow us to research planning and control methods that might be less precise, rely less on accurate object localization, or use hardware with less precise control or sensing.
What’s it like to be hugged by Punyo?
Kate Tsui, Punyo HRI tech lead: Although Punyo isn’t a social robot, a surprising amount of emotion comes through its hug, and it feels quite comforting. A hug from Punyo feels like a long, sustained, snug squeeze from a close friend you haven’t seen for a long time and don’t want to let go.
 A series of concept images shows situations in which whole-body manipulation might be useful in the home.TRI
A series of concept images shows situations in which whole-body manipulation might be useful in the home.TRI
(Interview transcript ends.)
Softness seems like it could be a necessary condition for bipedal humanoids working in close proximity to humans, especially in commercial or home environments where interactions are less structured and predictable. “I think more robots using their whole body to manipulate is coming soon, especially with the recent explosion of humanoids outside of academic labs,” Alspach says. “Capable, general-purpose robotic manipulation is a competitive field, and using the whole body unlocks the ability to efficiently manipulate large, heavy, and unwieldy objects.”